Elektromotory bez výbuchu se používají v lékařských technologiích, leteckém modelování, potrubích pro ropovody a v mnoha jiných průmyslových odvětvích. Ale mají své nevýhody, vlastnosti, stejně jako výhody, které někdy hrají klíčovou roli při navrhování různých zařízení. Ať je tomu tak, takový elektromotor zaujímá poměrně malou mezeru v porovnání s asynchronními střídavými stroji.
Vlastnosti elektromotorů
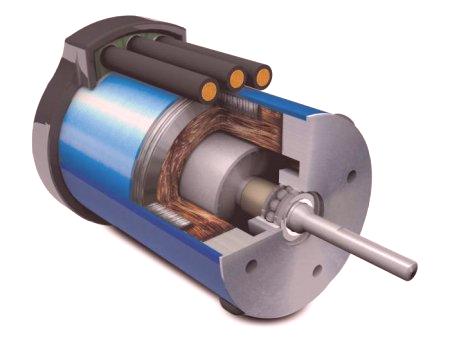
Jedním z důvodů, proč se návrháři zajímají o bezkontaktní elektromotory, je potřeba vysokorychlostních motorů s malými rozměry. Kromě toho mají tyto motory velmi přesné umístění. Konstrukce má pohyblivý rotor a stacionární stator. Na rotoru je jeden permanentní magnet nebo několik, uspořádaných v určitém pořadí. Na statoru jsou cívky, které vytvářejí magnetické pole.
Mělo by být poznamenáno ještě další funkce - elektromotory s plným kruhem mohou mít kotvu umístěnou jak uvnitř, tak i venku. V důsledku toho mohou mít dva typy návrhů určitou aplikaci v různých sférách. Když je kotva umístěna uvnitř, je možné dosáhnout velmi vysoké rychlosti, takže tyto motory fungují velmi dobře v konstrukcích chladicích systémů. V případě instalace jednotky s externím rotorem je možnédosažení velmi přesného polohování a vysoké odolnosti vůči přetížení. Velmi často se tyto motory používají v robotice, zdravotnických zařízeních a strojích s frekvenčním řízením.
Jak fungují motory
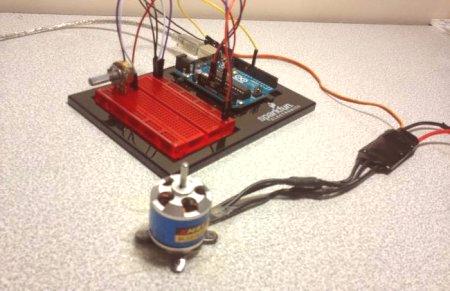
Pro pohon rotoru stejnosměrného elektrického motoru bez kolektorů je nutné použít speciální mikrořadič. Nemůže být spuštěn stejným způsobem jako synchronní nebo asynchronní stroj. Pomocí mikrokontroléru zapněte vinutí motoru tak, aby směr vektorů magnetického pole na statoru a kotvy byl ortogonální.
Jinými slovy, pomocí řidiče je možné nastavit točivý moment, který působí na rotor kolektorového motoru. K pohybu kotvy je nutné provést správné přepínání ve vinutí statoru. Bohužel neexistuje způsob, jak zajistit plynulou regulaci otáčení. Ale můžete velmi rychle zvýšit otáčky rotoru elektromotoru.
Rozdíly v motorech kolektorů a kolektorů
Hlavní rozdíl spočívá v tom, že na kolektorových motorech pro modely není na rotoru žádné vinutí. U kolektorových motorů mají jejich rotory vinutí. Na stacionární část motoru jsou instalovány permanentní magnety. Kromě toho je na rotoru instalován speciální designový kolektor, který je spojen s grafitovými kartáči. S jejich pomocí se na vinutí rotoru aplikuje napětí. Princip fungování kolektorového elektromotoru je také zásadníje jiný.
Jak pracuje kolektor
Pro spuštění kolektorového motoru je nutné napětí přivést na buzení, které se nachází přímo na kotvě. V tomto případě je vytvořeno trvalé magnetické pole, které interaguje s magnety na statoru, což má za následek ukotvení a kolektor, který je na něm připevněn. Tímto způsobem se napájí takové vinutí, opakuje se cyklus.
Rychlost otáčení rotoru závisí přímo na tom, jak silně magnetické pole a druhá charakteristika závisí přímo na velikosti napětí. Chcete-li zvýšit nebo snížit rychlost otáčení, musíte změnit napájecí napětí. Pro realizaci zpětného chodu stačí změnit polaritu připojení motoru. Pro takovou kontrolu nemusíte používat speciální mikrokontroléry, můžete měnit rychlost otáčení pomocí konvenčního střídavého odporu.
Vlastnosti neslušných strojů
Ovšem zde není možné ovládat elektrický motor bez použití speciálních regulátorů. Vycházíme z toho, že jako generátor nelze použít motory tohoto typu. Pro efektivní řízení můžete sledovat polohu rotoru pomocí několika senzorů Hall. S takovými jednoduchými zařízeními je možné výrazně zlepšit výkon, ale náklady na elektromotor se několikrát zvýší.
Spuštění turbulentních motorů
Vytvořte mikrokontroléry samyžádný smysl, mnohem lepší volbou bude nákup hotových, nechť je čínský. Následující doporučení by však měla být dodržena při výběru:
Zohledněte maximální dovolenou sílu proudu. Tato volba bude určitě užitečná pro různé typy pohonů. Charakteristiky jsou často označovány výrobci přímo v názvu modelu. Velmi zřídka uvádějte hodnoty charakteristické pro špičkové režimy, u kterých mikrokontrolér nemůže fungovat po dlouhou dobu.
Pro dlouhodobou práci je třeba vzít v úvahu maximální hodnotu napájecího napětí.
Nezapomeňte vzít v úvahu odpor všech vnitřních obvodů mikrokontroléru.
Je nutno vzít v úvahu maximální počet otáček, který je charakteristický pro činnost mikrokontroléru. Všimněte si, že při omezení na úrovni softwaru nebude možné zvýšit maximální rychlost otáčení.
Levné modely mikroprocesorových zařízení mají frekvenci generovaných pulsů v rozsahu 78 kHz. Drahé instance mohou být přeprogramovány a tento parametr se zvýší o 2-4 krát.
Zkuste vybrat mikrokontroléry pro všechny parametry, protože ovlivňují výkon, který může elektrický motor vyvíjet.
Jak se ovládání provádí
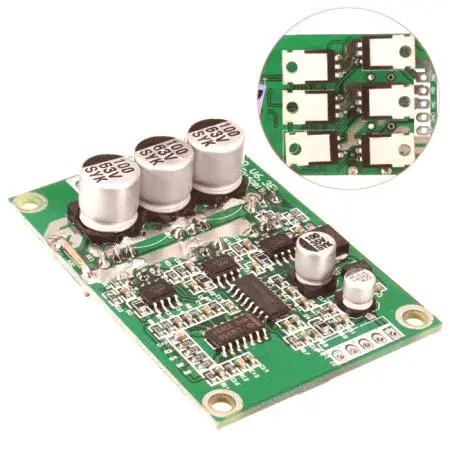
Elektronická řídicí jednotka umožňuje spínání vinutí pohonu. Pro určení spínacího momentu pomocí řidiče je sledována poloha rotoru od snímače Hall instalovaného na pohonu.
V případě, že takové zařízení neexistují,je nutné číst zpětné napětí. Generuje se ve statorových cívkách, které nejsou v daném okamžiku připojeny. Řadič je hardwarový a softwarový komplex, který umožňuje sledovat všechny změny a přesně určit pořadí komutace.
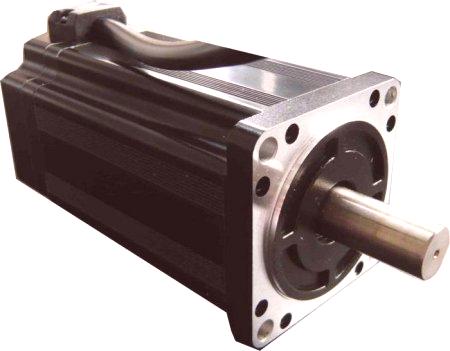
Trojfázové elektromotory bez turbodmychadel
Mnoho plnoproudých elektromotorů pro vzduchové motory je vyrobeno pro stejnosměrný proud. Existují však tři fázové instance, ve kterých jsou nainstalovány měniče. Umožňují provádět třífázové impulsy z konstantního napětí.
Práce je následující:
Impulsy s pozitivní hodnotou jsou přijímány na cívce "A". Na cívce "B" - s negativní hodnotou. V důsledku toho se kotva začne pohybovat. Snímače zachycují zkreslení a vysílají signál do regulátoru pro další přepínání.
Existuje odpojení cívky "A", přičemž pozitivní hodnota impulsu přichází na vinutí "C". Přepínání vinutí "B" se nezmění.
Na cívce "C" je pozitivní impuls a negativní vstupuje do "A".
Pak přijde práce páru "A" a "B". Jsou dány pozitivní záporné hodnoty impulsů.
Poté pozitivní hybnost opět vstoupí do cívky "B" a negativní na "Z".
V posledním kroku je cívka zahrnutí „A“, který přijímá pozitivní impuls a negativní na sever
A pak je opakování cyklu.
Výhody použití
Vytvoření bezdotykového bezdrátového elektromotoruJe obtížné implementovat řízení mikrokontroléru. Proto je nejlépe použít hotové průmyslové vzory. Ale být jisti, aby zvážily výhody, které plynou řídit pomocí elektrického commutatorless:
podstatně větší zdroje než sběratelských vozů.
Vysoká účinnost.
Výkon je vyšší než výkon kolektorových motorů.
Rychlost psaní je mnohem rychlejší.
Jsou-li jiskry není vytvořen, takže mohou být použity v podmínkách s vysokou nebezpečí požáru.
Velmi snadná obsluha pohonu.
Při práci není třeba používat další chladicí součásti.
Jednou z nevýhod jsou velmi vysoké náklady, vzhledem k ceně regulátoru. Dokonce krátce obrátit otestovat výkon tohoto motoru nebude fungovat. Kromě toho je oprava těchto motorů mnohem obtížnější díky konstrukčním prvkům.