Při práci s Arduino používají řada rádioamatérů motory postupně. Ale co je tohle? Jak jej připojit? A jak s ním pracovat? A obecně, kde jsou použity? Odpovědi na všechny tyto otázky budou uvedeny v tomto článku.
O krokových motorech
Lze říci, že krokové motory jsou základem precizní robotiky. Používají se všude díky své přesnosti. Fakt je, že krokové motory používají při otáčení hřídele malé kroky, které jim umožňují být přesně při práci. To bylo díky jejich "krokům" a začalo být nazýváno krokovými motory. Vezměte například tiskárnu. K dispozici je také krokový motor. Nebo jakýkoli manipulátor, kde je přesnost velmi důležitá, protože i když robot udělá chybu v půl stupni - všechno se pokazí. Analogové krokové motory lze považovat za servopohony, jelikož jejich programování rovněž udává stupeň rotace, avšak servomotor nižší než krokové motory s přesností. Existuje však mnoho situací, kdy použití servopohonů je vhodnější než použití "chodců".
Stepper motor 28BYJ-48
Mezi velkým výběrem krokových motorů je to právě krokový motor modelu 28BYJ-48. Stojí to poměrně levně, jen 100-150 rublů za kus. Jak vypadá krokový motor pro Ardouins, můžete vidět na fotografii níže.
Mnoho radiových amatérů upřednostňuje tento konkrétní model kvůli nízkým cenám a dobré přesnosti. Typ motoru - unipolární, počet fází - 4. Spotřebakrokový motor pro Arduinov od 5 do 12V. Doporučuje se však použít 6-7V. Motory mohou pracovat ve dvou režimech: full-stage a half-step. Doporučeno pro použití v režimu s polovičním zdvihem. Je to 5625 stupňů na krok. Při plném kroku je krok 1125 stupňů. Hmotnost motoru - 30 gramů.
řidič ULN2003
Pro připojení krokového motoru k Arduinovům se používá speciální řidič. Jedním z nich je ULN2003. To je způsobeno skutečností, že když je krokový motor běží, síla proudu je poměrně silná, což Arduino kontakty prostě nemůže odolat. K tomu je použit ovladač. Samotný motor se připojuje k řidiči, je téměř nemožné vše zaměnit, protože je k dispozici klíč, který ukazuje, jak přesně se má připojit. No, a pak se řidič sám připojuje k Arduino pro další práci. Často v obchodech je již řidič vybaven krokovým motorem. Existují však případy, kdy jsou motory prodávány bez řidiče, musíte je věnovat pozornost. Pokud kupujete Aliexpress, je lepší pracovat pouze s osvědčenými prodejci s mnoha recenzemi.
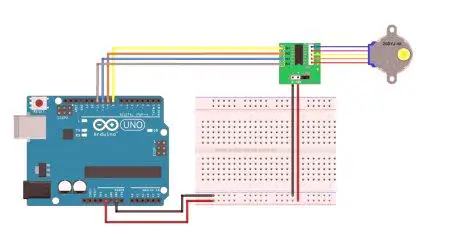
Připojení
Jak bylo uvedeno výše, je řidič používán k ovládání krokového motoru od Arduin. Pro napájení motoru musíte použít jiný zdroj, abyste zabránili přetížení karty Arduino. A další závěry, počínaje IN1 až IN4, se připojujeme k jakýmkoli digitálním kontaktům na "Arduinově". Jak vidíte, připojení krokového motoru k Arduin je poměrně jednoduché. Na obrázku můžete vidět příklad připojení.
Kancelář
Prořízení stepních motorů z "Ardouinov" jako součásti vývojového prostředí již obsahuje připravenou knihovnu, která umožňuje řídit motor pomocí malého programového kódu. Kdyby tomu tak nebylo, muselo by s pomocí speciálního stolu sestavit a vypočítat pohyb motoru, což by trvalo spoustu času. Existuje však také mínus této knihovny. Faktem je, že umožňuje použití motoru pouze v režimu v plném režimu. Ačkoliv se v první polovině kroku doporučuje použít "krok". Ale pro jednoduché projekty s jednostupňovým motorem je tato knihovna vhodná. Říká se Stepperovi. Můžete napsat kód pro ovládání krokového motoru z "Arduin". Náčrt vypadá jako příklad níže.
#include
const int stepsPerRevolution = 200;
Stepper myStepper (krokyPerRevolution, 891011); //připojení k pinům 811 na Arduinov
void setup () {
myStepper.setSpeed (60); //nastavení rychlosti rotoru
Serial.begin (9600);
}
void loop () {
//Funkce čeká, aby příkaz převedl text a poslal signál na motor, aby ho otočil na zadaný počet kroků.
Serial.println ("Přesunout doprava"); //ve směru hodinových ručiček
myStepper.step (stepsPerRevolution);
zpoždění (1000);
Serial.println ("Přesunout doleva"); //proti směru hodinových ručiček
myStepper.step (-stepsPerRevolution);
zpoždění (1000);
}Toto je příklad ze samotné knihovny pro řízení krokových motorů. Můžete určit, kolik kroků musíte provést a jakou rychlostí. Zvažte kód podrobněji. Na začátku je Stepperova knihovna již propojenabylo řečeno výše. Poté je vytvořeno pole s počtem kroků, které musí krokový motor provádět. Dále je vytvořena proměnná typu stepper s daty pomocí kontaktů, které jsou připojeny k krokovému motoru Arduino. Rychlost je nastavena a již probíhá pohyb krokového motoru. Pokud však chcete v projektu použít více než jeden motor a pracovat v polovičním kroku, můžete použít knihovny třetích stran. Jedním z nich je Accel Stepper. Tato knihovna se ukázala velmi dobře v práci, má mnoho příležitostí. Při práci s jejími kroky jsou přesné, motory se nezahřívají. Obecně se doporučuje používat. Chcete-li nainstalovat knihovnu, je nutné stáhnout a přenést obsah archivu do složky Knihovny v kořenovém adresáři Arduino. V tomto článku jsme diskutovali příklad připojení krokového motoru k Arduinovovi a jeho ovládání programovým kódem. Každý radioamatér se musí alespoň jednou v jeho projektech pokusit s ním pracovat!