Zvýšení požadavků na systémy souřadnic určuje potřebu vytvoření nových principů navigace. Zejména podmínka, která určuje přítomnost, bylo zavedení relativně samostatných prostředků měření umístění cílových objektů. Tyto schopnosti poskytují inerciální navigační systém, čímž eliminuje potřebu využívat signály z rádiových majáků a satelitů.
Obecné informace o technologii
inerciální navigační na základě zákonů mechaniky, která vám umožní nahrávat parametry pohybu těles ve vztahu k stanoveného referenčního systému. Poprvé byla tato zásada plavby aplikována poměrně nedávno v lodních gyro kompasích. Jako zlepšení tohoto typu instrumentace došlo techniku, která určuje parametry měřené na základě zrychlení tel. Teorie inerciálního navigačního systému se začala formovat blíže k třicáté létům. Od tohoto okamžiku vědci tohoto směru začali věnovat větší pozornost principům stability mechanických systémů. V praxi je tento koncept obtížně realizovatelný, takže po dlouhou dobu zůstal pouze v teoretické podobě. Ale v posledních desetiletích s příchodem speciálních zařízení na počítačových inerciální navigační nástroje byly používány značně v letectví, technologie vody, a tak dále. D.
Součásti systému
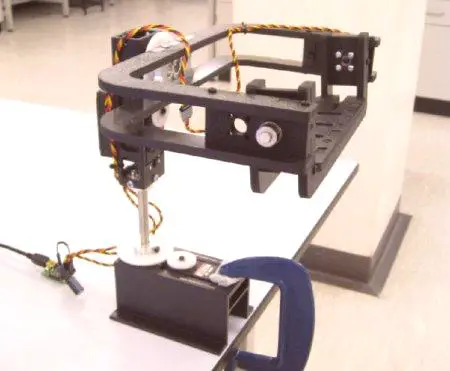
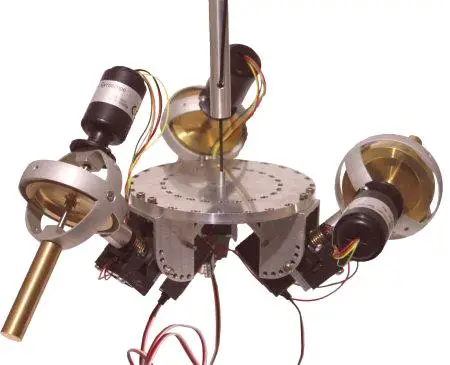
Povinnými prvky každého inerciálního systému jsou bloky citlivostiměřící přístroje a výpočetní přístroje. První kategorií prvků jsou gyroskopy a akcelerometry, druhá je počítačová technika, která implementuje určité algoritmy výpočtů. Přesnost metody závisí do značné míry na charakteristikách citlivých zařízení. Například spolehlivá data mohou poskytovat inerciální navigační systémy pouze s gyroskopy přesného typu ve spojení s akcelerometry. Ale v tomto případě má technické zařízení vážnou nevýhodu ve formě vysoké složitosti elektromechanické výplně, nemluvě o velké velikosti zařízení.
Princip funkce systému
Metoda určení souřadnic pomocí inerciálního systému je zpracování dat o zrychlení těles, jakož i jejich úhlové rychlosti. K tomu je opět použito citlivé prvky instalované přímo na cílovém objektu, které generují informace o poloze, průběhu pohybu, traverzu a rychlosti. Navíc princip inerciálního navigačního systému umožňuje použít prostředky pro stabilizaci a dokonce i automatické ovládání objektu. Pro tyto účely se používají lineární zrychlení snímačů s gyroskopickým zařízením. Pomocí těchto zařízení je vytvořen systém zpráv pracujících ve vztahu k trajektorii pohybu objektu. Vygenerovaný souřadný systém určuje úhly sklonu a otáčení. Výhody této technologie zahrnují autonomii, schopnost automatizace a vysoký stupeňodolnost proti šumu.
Klasifikace inerciálních navigačních systémů
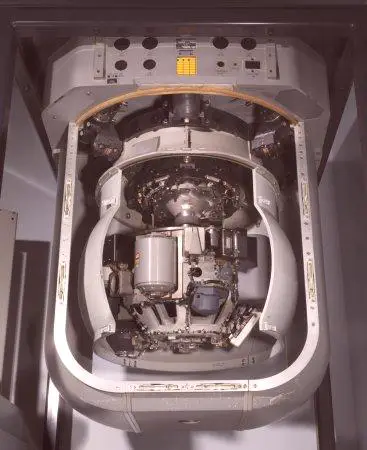
Na základě zvažovaných navigačních systémů jsou rozděleny na platformu a platformu (BINS). První se nazývá geografická a může obsahovat dvě platformy. Jedna je vybavena gyroskopy a je orientována v inerciálním poli a druhá je řízena akcelerometry a stabilizuje se vzhledem k horizontální rovině. Výsledkem je, že souřadnice jsou určeny pomocí informací o relativní poloze obou platforem. Technologické modely jsou BINS. Inerciální navigační systém volné formy nemá žádné nevýhody spojené s omezeními používání giroplatmů. Funkce určování rychlosti a umístění objektů v takových modelech jsou překládány do digitálního výpočtu, který je také schopen zachytit data na úhlové orientaci. Současný vývoj systémů BINS je zaměřen na optimalizaci výpočetních algoritmů bez snížení přesnosti výstupních dat.
Způsoby určení orientace plošných systémů
Neztrácí význam a systémy pracující s platformami určují zdrojová data o dynamice objektu. V současné době jsou úspěšně využívány následující typy inerních navigačních modelů platformy:
Geometrický systém. Standardní dvouplatformový model, který byl popsán výše. Takové systémy jsou vysoce přesné, ale mají omezení při obsluze vozidel s velkými manévry působícími ve vesmíru.Analytický systém. Také akcelerometry a gyroskopy, které jsou vůči hvězdám stacionární. Výhodou takových systémů je schopnost účinně manipulovat s manévrovatelnými předměty, jako jsou střely, vrtulníky a stíhací trysky. Ale dokonce i ve srovnání s inerciálním navigačním systémem bez plošiny vykazují analytické komplexy nízkou přesnost stanovení parametrů dynamiky objektu. Semi-analytický systém. Poskytuje jedna platforma, která se neustále stabilizuje v prostoru místního horizontu. Na této základně jsou umístěny gyroskop a akcelerometr a výpočty jsou uspořádány mimo pracovní plošinu.Vlastnosti inerciálních satelitních systémů
Jedná se o slibnou třídu integrovaných navigačních systémů, které kombinují výhody zdrojů družicových signálů a považují za inerciální modely. Na rozdíl od populárních družicových systémů umožňují takové komplexy dodatečné využití dat v úhlové orientaci a formulují nezávislé algoritmy pro určení polohy v nepřítomnosti navigačních signálů. Získání dalších informací o geolokaci vám umožňuje technicky zjednodušit modely citlivých prvků a dát se drahým zařízením. Mezi výhody inerciálního navigačního systému patří malá hmotnost, malá velikost a zjednodušené schémata zpracování dat. Na druhé straně nestabilita mikroelektromechanických gyroskopů způsobuje hromadění chyb při určování dat.
Oblastipoužití inerciálních systémů
Mezi potenciální zákazníky inerční navigační techniky patří zástupci různých průmyslových odvětví. Nejde jen o letecký průmysl, letectví, ale i automobilový průmysl (navigační systém), robotika (kontroly kinematické charakteristiky), sportovní (Stanovení dynamiky pohybu), léky a dokonce i domácí spotřebiče t. D.
Závěr
Teorie inerciální navigace, což je pojem, který byl vytvořen v minulém století, dnes lze považovat za plně divize mechatroniky. Nedávné pokroky však naznačují, že v přední části se mohou objevit progresivní objevy. Důkazem toho je úzká souvislost inerciálních navigačních systémů s počítačem a elektronikou. Existují nové ambiciózní úkoly, rozšiřují se prostor pro vývoj souvisejících technologií, jsou také založeny na teoretické mechanice. Zároveň odborníky v této oblasti jsou aktivně pracuje na optimalizaci technických prostředků, základ, který může být nazýván mikromechanických gyroskopy.